
Moreno Salinas sinala que as solucións baseadas en IA e ciencia de datos para os vehículos autónomos revolucionará sectores como a industria, o transporte ou a investigación, dando novas oportunidades económicas
O profesor da UNED puxo como exemplo a robótica marina. Así mencionou o sistema autónomo para a contención de verquidos mariños: SAVEMAR, composto por barcos de superficie, un centro de control de terra e unha plataforma de recarga e atraque automática, que permita que os barcos se despreguen de forma individual ou coordinada arrastrando unha barreira ou ben outros sistemas de loita contra verquidos nunha zona especificada mediante referencias xeográficas precisas.

OURENSE, 12 de marzo de 2021.-O profesor David Moreno Salinas protagonizou a segunda xornada da nova fase do Seminario de IA que organiza a UNED en Ourense co apoio do Vicerreitorado de Investigación, Transferencia do Coñecemento e Divulgación Científica. Todas as sesións emítense desde o Centro de Intelixencia Artificial de Ourense, no seu espazo Os venres con IA. Moreno expuxo que a IA está presente en multitude de aplicacións diarias (móbiles, programas, etc.) e é unha constante en todas as noticias. Permite a transformación de múltiples áreas: laboral, industrial, agricultura, transporte, lecer… e citou como exemplos a optimización industrial, análise da produción, diagnóstico médico, optimización produción agrícola, previsión de mercados, detección de erros, etc.
David Moreno explicou que se entende por vehículo autónomo “aquel que imita as capacidades de manexo e control dun operario, percibindo a contorna, establecendo a súa situación nel, e realizando unha navegación adecuada. Os vehículos autónomos son unha realidade en múltiples áreas e campos” e indicou que hai perspectivas de uso en ámbitos como o coche autónomo, repartición con drons, agricultura, investigación, exploración, industrial, militar… “A IA e as súas aplicacións fan que moitos dos retos e problemas presentes nos vehículos autónomos poidan ser abordados con novas perspectivas”, sinalou Moreno, quen falou de “operacións baseadas en información recollida por sensores e algoritmos de IA (Ex. recoller datos, planificar traxectoria e executala). Todas estas accións pretenden substituír as habilidades humanas por procesos de IA, pero aínda hai moitas que requiren moito traballo”.
Existen numerosas áreas de traballo que ofrecen múltiples oportunidades, e puxo como exemplo de aplicación de solucións con vehículos autónomos a robótica mariña. Así mencionou o sistema autónomo para a contención de verteduras no mar: SAVEMAR. Trátase dun sistema autónomo composto por barcos de superficie, un centro de control de terra e unha plataforma de recarga e atraque automática, que permita que os barcos se despreguen de forma individual ou coordinada arrastrando unha barreira ou outros sistemas de loita contra verteduras nunha zona especificada mediante referencias xeográficas precisas. Para iso necesítase un elevado número de sensores: gran cantidade de datos en tempo real, algoritmos de IA + técnicas clásicas que proporcionen un comportamento máis seguro e eficiente.
Os retos complexos e importantes a superar son, segundo o relator:
- Computación intensiva
- Tempo real
- Restricións de velocidade e memoria
- Consumo enerxético
- Latencia de comunicacións
Análise e modelado
Cálculo de modelos matemáticos (simples e complexos), deseño de algoritmos de control con modelos simplificados, definición do sistema completo.
Simulación
Modelo detallado (baseado en datos ou físico) ademais da validación do sistema e de algoritmos.
Desenvolvemento do sistema, con software de control, software de tempo real e hardware.
Validación e verificación
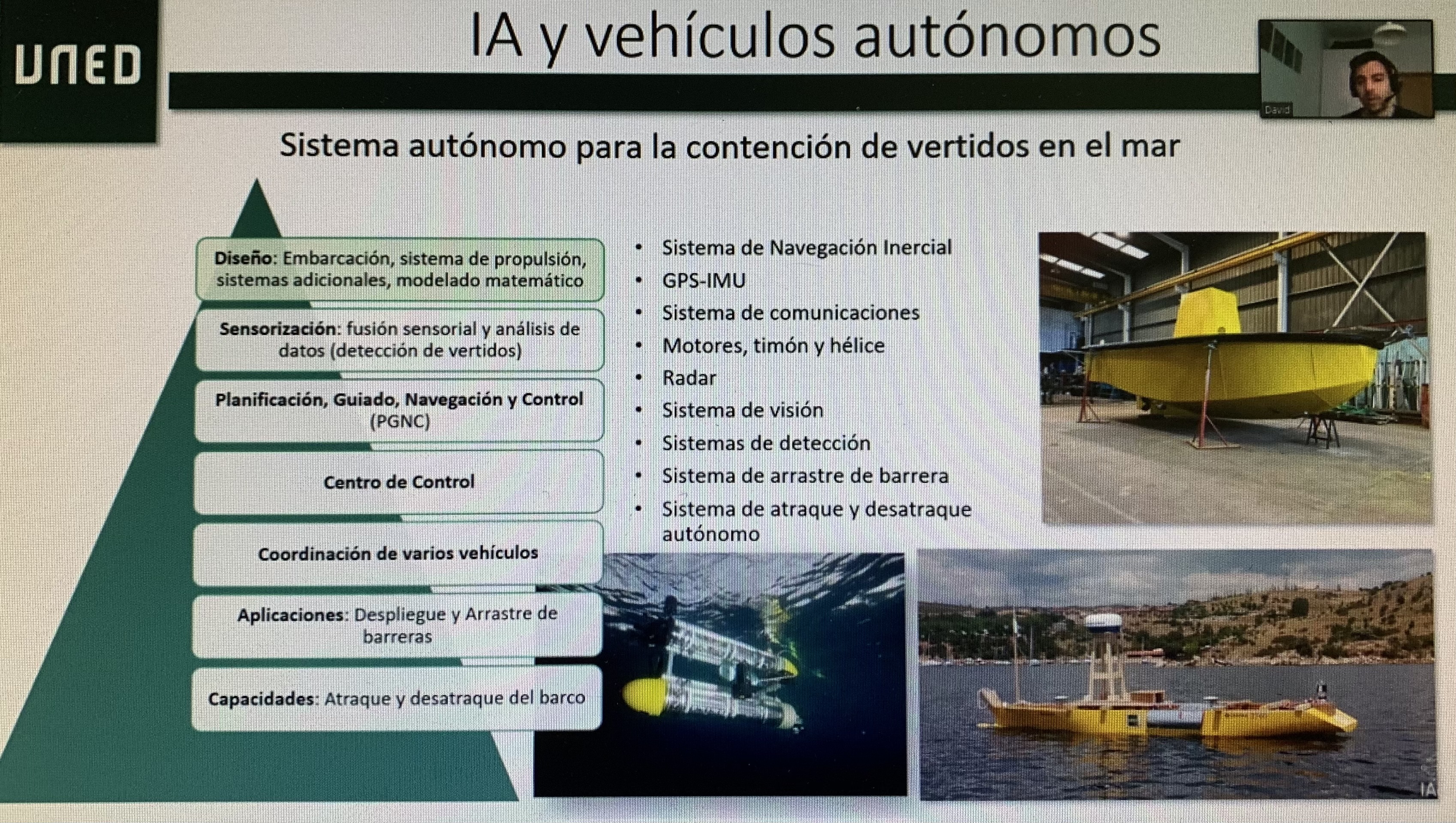
As etapas para o desenvolvemento dunha solución mostráronse aplicadas ao sistema autónomo para a contención de verteduras no mar do proxecto SAVEMAR, indicando os puntos principais a tratar en cada un:
Deseño: Embarcación, sistema de propulsión, sistemas adicionais, modelado matemático. Definición dos elementos necesarios para os vehículos:
- Sistema de Navegación Inercial
- GPS- IMU
- Sistema de Comunicacións
- Motores timón e hélice
- Radar Sistema de Visión
- Sistemas de detección
- Sistema de arrastre de barreira
- Sistema de atracada e desatraque autónomo
- Radar para detectar obstáculos ou embarcacións.
- Visión artificial para atracada e desatraque
- GPS- IMU
- Sensores para detección de vertidos
- Sinais dos motores, temón, revolucións da hélice
- Obxectivo: Atopar o camiño máis seguro, máis adecuado e máis económico entre dous puntos A e B usando o coñecemento previo que se teña e os datos que se estean recibindo. Readaptándolo en caso de necesidade en tempo real.
- Optimización da traxectoria do vehículo
- Evitar obstáculos
- Coordinarse con outros vehículos
- Optimizar o uso de enerxía
- Posicionamento do vehículo (GPS)
- Algoritmos de control
Coordinación de varios vehículos. Para poder controlar os vehículos de forma coordinada hai que ter en conta:
- Información de distancias dispoñibles para localización de múltiples obxectivos
- Redución de enerxía para o control de vehículos
- Limitacións das dinámicas dos vehículos
- Evasión de obstáculos
- Limitacións da comunicación inter-USVs (dependente da rede)
- Conxunto de elementos flotantes
- Unións flexibles
- Faldón de arrastre
- Forzas de arrastre nas extremos
- Forzas de ligadura e hidrodinámicas nos elementos
- “Nada hidrodinámicas”
- Moita resistencia nunha dirección e pouca na outra
Moreno Salinas sinala que o modelado matemático é unha etapa fundamental na enxeñería e que a necesidade de modelos precisos é común en múltiples áreas e aplicacións. Por exemplo, para os vehículos autónomos, os modelos son necesarios para múltiples aplicacións: simulación, planificación, estimación, control… En robótica mariña as probas experimentais son especialmente custosas en tempo e diñeiro polo propio medio, polo que dispoñer de modelos precisos aforraría tempo e diñeiro.
O relator pregúntase por que se fala tanto de modelado e identificación en vehículos autónomos e é que “o modelado e a simulación poden levarnos ao 80% do esforzo de análise. O modelo é unha representación matemática do noso sistema, que permite analizar e simular o sistema tendo atopa que os modelos nunca son perfectos”.
O modelado a realizar depende do obxectivo e así sinala o relator que un único sistema pode ter múltiples modelos, que hai gran cantidade de modelos dispoñibles na literatura e que o desenvolvemento dun novo modelo desde cero é moi custoso e complexo. Os principais obxectivos do modelado en enxeñería de control son analizar o sistema en detalle e realizar simulacións detalladas e precisas.
Foi citando o desenvolvemento do modelo e a súa validación, a identificación dos parámetros do modelo como paso necesario, engadindo que todo modelo debe cumprir unhas características, é dicir, que se debe asumir unha estrutura de modelo, recoller datos do sistema experimentos dedicados ou operación normal e axustar os parámetros para conseguir un bo axuste.
Mencionou o modelado físico e o baseado en datos. Do primeiro sinalou que interesa a relación entre entradas e saídas, e as causas internas e fenómenos físicos que provocan esa saída. leva a cabo unha representación matemática do comportamento físico do sistema, para comprender os seus diferentes elementos, o seu funcionamento e a relación que gardan as diferentes partes. “Buscamos unha representación do sistema real”, indicou, para poder reproducilo matematicamente. O modelado baseado en datos é interesante pola relación entre entradas e saídas, non as causas internas que orixinan esa saída. “A identificación clásica require a realización de múltiples manobras en condicións ideais para cada un dos parámetros hidrodinámicos dun vehículo, co consecuente custo económico e temporal”. Este modelado permite reducir o tempo e o número de probas necesarias para o cálculo de modelos, reaxustar os modelos físicos para as condicións propias de cada vehículo e poder recalcular os modelos.
“Ambos os tipos de modelado poden beneficiarse das técnicas de IA e de ciencia de datos para obter modelos físicos cun número de probas no primeiro caso, e para obter modelos específicos e moi detallados para o sistema en cuestión no segundo caso”, sinala o relator.
Vantaxes e inconvenientes de ambos os modelos: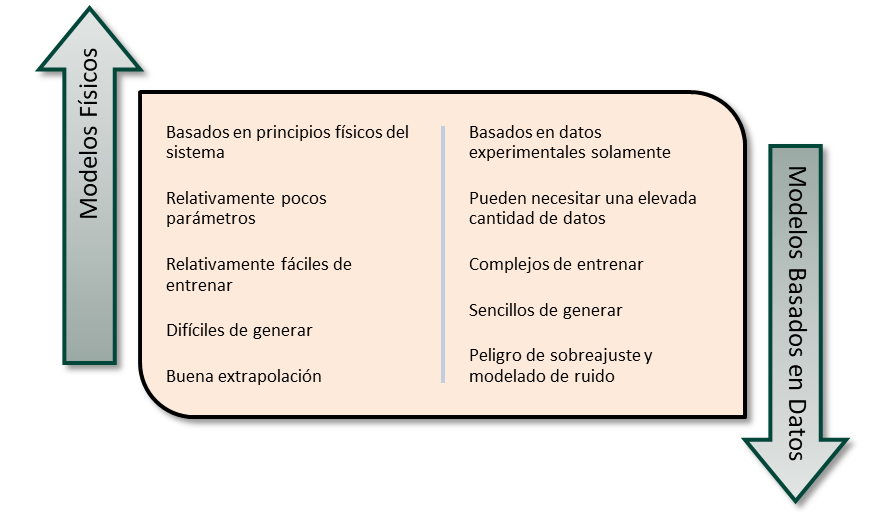
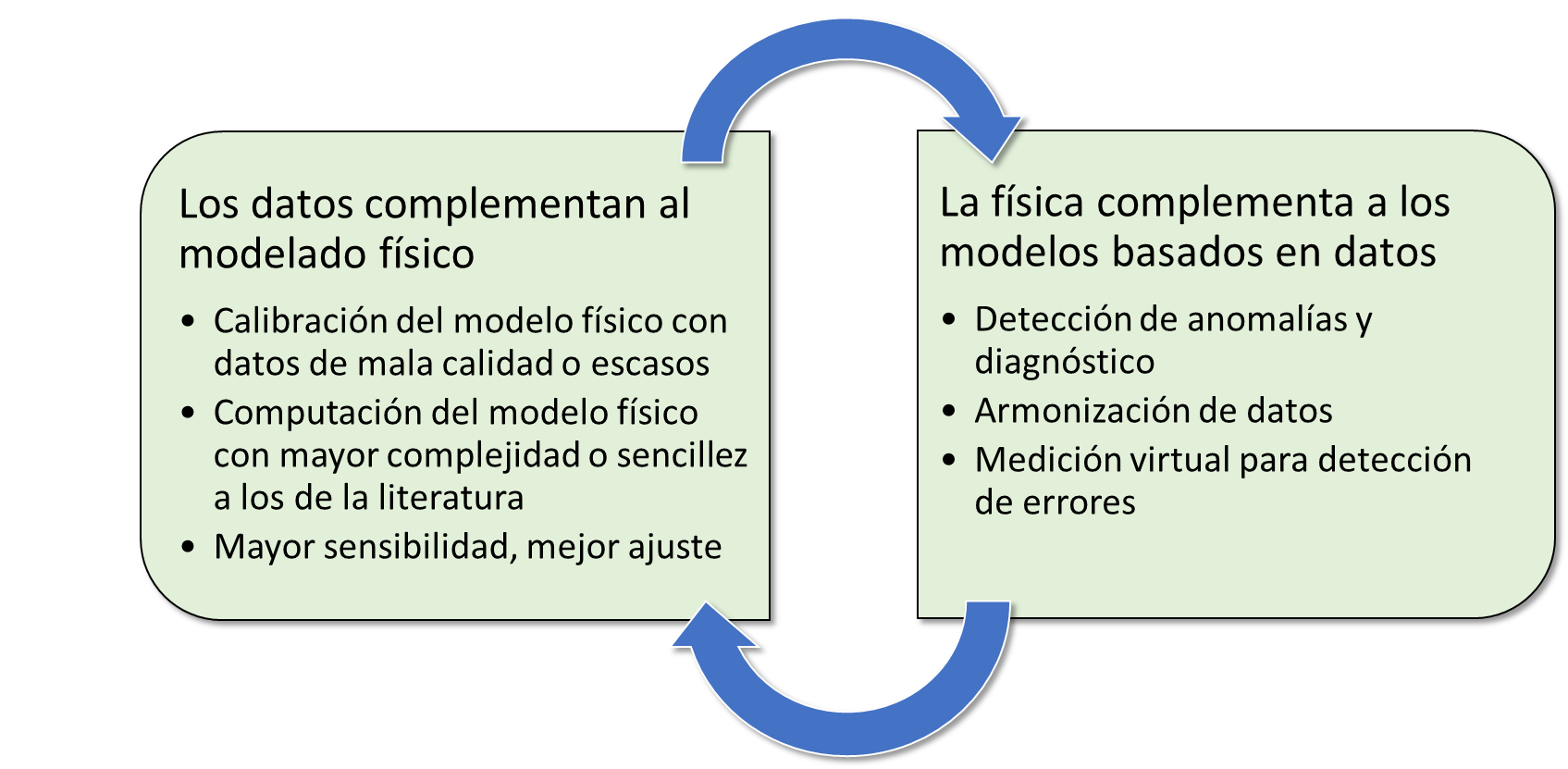
David Moreno menciona un modelado híbrido, que permita combinar o modelado físico co baseado en datos usando algoritmos de intelixencia artificial e ciencia de datos. Permitiría aproveitar as vantaxes destes dous modelados e combinalos de maneira que se solucionen as fraquezas de ambos. Así se pretende complementar o modelo físico do vehículo con termos descoñecidos que permitan unha mellor representación do comportamento do vehículo. Así un mesmo modelo poderá adaptarse, axustarse e resintonizarse para novos sistemas ou para cando un sistema cambie a súa configuración.

O relator citou o Proxecto Nautilus, no que participan a Universidade Nacional de Educación a Distancia, (UNED); a Universidade Politécnica de Madrid (UPM); a Universidade de Málaga (UMA) e a Universidade de Las Palmas de Gran Canaria (ULPGC). O obxectivo é o desenvolvemento dun enxame de vehículos submarinos controlados por intelixencia artificial. Isto implica modelado e identificación dos vehículos submarinos, deseño dun marco de coñecemento do contexto para interaccionar coa contorna; integración da electrónica desenvolvida para as novas capacidades dentro de vehículos comerciais existentes así como o deseño e implementación dun sistema de posicionamento, algoritmos de navegación baseados en intelixencia artificial, e de comportamentos colaborativos baseados nos principios de enxames e IA, concluíndo coa validación experimental.
O obxectivo do grupo G13 da UNED é a identificación e modelado dos vehículos mariños, levando a cabo a identificación usando técnicas e modelos existentes na literatura, desenvolvendo novos modelos mediante técnicas da ciencia de datos; desenvolvemento de técnicas en liña e en tempo real de reaxuste e computación de modelos matemáticos así como o desenvolvemento de sistemas de detección de erros en tempo real, para reaxuste dos sistemas de control, reaxuste dos parámetros dos modelos e recuperación segura dos vehículos.
Os retos adicionais da IA para aproveitar o modelo híbrido son os seguintes: resposta en tempo real, complexidade computacional, precisión e fiabilidade; seguridade e cuestións éticas.
Por último, David Moreno Salinas expuxo que as solucións baseadas en IA e en ciencia de datos dentro do campo dos vehículos autónomos “van revolucionar múltiples campos como en industria, transporte, investigación, etc. e que van proporcionar novas oportunidades económicas”. “Estas solucións poden ser aproveitadas dentro do modelado de vehículos para desenvolver novas aplicacións e ofrecer solucións a retos non resoltos, como os modelos híbridos para sistemas de control intelixentes, detección de erros, mantemento preditivo ou mesmo sistemas de recomendación, ofrecendo unha gran cantidade de oportunidades para traballar e un campo fascinante de investigación”.
Ver a intervención de David Moreno Salinas
O Seminario de IA de UNED Ourense volve o venres, día 26 de marzo, coa intervención do profesor doutor da UNED, Andrés Duque Fernández, quen disertará sobre Tradución automática. Evolución histórica, aproximacións actuais e desafíos abertos.
 UNED Ourense
UNED Ourense
Comunicación




